

PID controllers are applied in more than 90% of control loops over a wide range of process industries. A well-configured and well-tuned PID control will increase productivity and life of the equipment, while reducing emissions and energy consumption. When introducing the PID loop to your plant, the following basic procedure will be very helpful to all operators and engineers when tuning loops.
Background of PID Control
How PID Controls Behave
At first, we need to review the PID control behaviour. Basically, PID control has the following basic control scheme according to the process input and control target, which determines the control output.
The figure shows a typical PID control scheme.
PB: Controller Proportional band, Ti: Controller integral time, Td: Controller derivative time.
Steps:
Proportional Action
Integral Action
Derivative Action
1 - Proportional action is when you increase the PB parameter, the process output response PV moves forward to the control target SV without overshoot. On the other hand, when decreasing PB, the PV response becomes faster with overshoot.
2 - Integral action reduces the offset between SV and PV. When it increases, the PV response becomes slower but with less overshoot or undershoot. On the other hand, when decreasing, the PV response becomes faster but with overshoot.
3 - Derivative action fastens the rising of PV response. It is effective when the process response is slower.
Besides the explained PID algorithm, there exist a few derivatives, such as IP-D type and PI-D type. The PID type is mainly used for the set-point tracking control. On the other hand, I-PD is for disturbance regulation, where inputs to Integral and Derivative actions are limited to process output signals. The PI-D is located between them, where the input to derivative action is process output only.
From the process frequency analysis point of view, Integral action covers the lower frequency response area, and the Derivative action covers high frequency response area.
How to Recognize the Process Behaviour
Before applying PID controllers, we also need to know the basic dynamics of the target process behaviour. The process behaviour is obtained from the loop response using the loop oscillation, applying test signals or analysing the long range operation data. One of the simple ways is to represent the process behaviour using a simple linearised model. Simple representation of process for PID control tuning consists of 4 parameters below:
Process Gain
Process Response time
Process Dead time
Stable/ Ramp process
1 - Process gain shows how much amplitude of process output changes and becomes stable after applying a step test signal to the process.
2 - Process response time shows the response time moving from one steady state to another after applying a step test signal to the process.
3 - Process dead time shows a period when the response begins to rise/down after applying a step signal.
Some process response increases infinitely when applying a step test signal. In this case it is called an integral process, where we apply the pulse signal instead of step signal. The tank level or exothermic reactor has the same dynamic response characteristic.
How to Implement and Tune the PID control
Using the information from the above two steps, we can now tune the PID control based on the tuning criterion such as overshoot minimum, quick rising, minimizing the integral variation, etc. A cut-and-try approach is also required with minimum effort.
Quick Guide to Tune Loops
Since recently, the commercial market and academics provide us lots of PID tuning tools and training courses based on the above information. The most popular tuning methods are categorized into follows:
Closed Loop Tuning
Open Loop Tuning
Closed Loop Tuning
One of the original and most widely used closed loop tuning method is Ziegler Nichols method. At first, increase the control proportional gain step-by-step and observe the following loop behaviour. When the loop begins continuous cyclic oscillation, stop the gain increase and measure the controller proportional band PBu (100/PBu is defined as proportional gain) and the oscillation period Tu at that time. Using these parameters, optimal PID tuning coefficients are calculated as follows, for example:
The criterion of this tuning method is to reduce the second oscillation amplitude to 1/4 of the first oscillation (quarter amplitude damping). So, lots of PID tuning rules to calculate from the obtained Ku and Pu are now proposed in the academic and commercial market.
Are you enjoying this article?? Follow us on LinkedIn and Facebook..
Open Loop Tuning Method
This method applies the test signal to the process and obtains the continuing dynamic process response.
To obtain the appropriate process response, the following procedure is applied:
First, make the process stable
Second, apply a unit step signal to the process input. The test signal amplitude should be enough larger to obtain the effective process response, though it is also important not to make the process unstable
Wait for the process response until the process becomes stable enough
Apply another test signal to the inverse direction to keep the process at the first stable condition.
Applying a few sets of test signals is preferable until you can get the suitable response, if allowed.
The obtained process response data is used to estimate the process model, such as 1st order, and 2nd order transfer model. The obtained process model is approximated as the following transfer model;
Kp Exp (-θs) / (1 +Tps), where Kp: process gain, θ: process delay, Tp: Process lag (time constant)
As an actual process is not exactly the same as the 1st order model (FOPTD) or the 2nd order model (IPTD), we need to approximate the response using these models. For example, the process lag is estimated from 63.2% process rising response and 28.3% process rising response to the total amplitude.
In order to get the optimal PID tuning from the obtained dynamic process model, it needs the appropriate tuning criterion such as Minimum IAE (Integral of the absolute value of the error) or ITAE (Integral of the time weighted absolute value of the error) criterion. Recently, the popular tuning method is the Internal Model Control (IMC) method. It specifies a desired closed response time at first and tune PID parameter from both desired response time and the estimated process model. See Chart 1 below for one example.
One of the important issues is that as the estimated model includes any modelling error that might occur, it needs to adjust the desired response time TSPEC according to the estimated modelling error. When the modelling error is estimated larger, it is preferable to set TSPEC larger to provide the robustness to the controller, and vice versa.
An example of PID tuning:
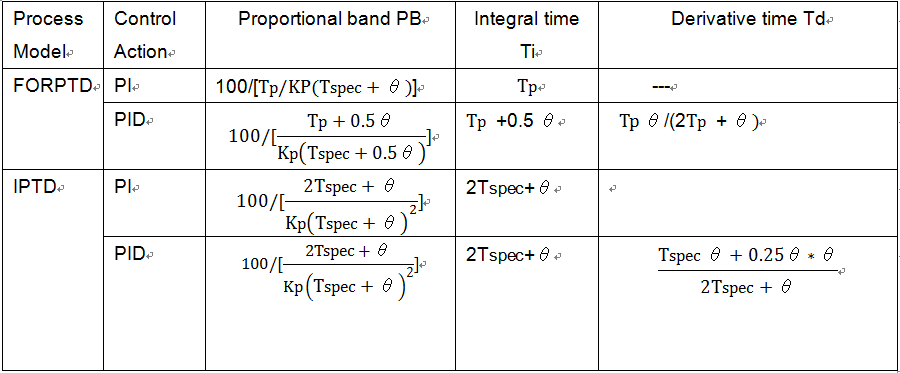
Example of IMC-based PID Tuning:
Tuning Tips and Know-how
After developing a process model, tuning PID parameters and applying an actual process described above, we can get the closed loop response data in set-point change. Sometimes we recognize that the obtained closed loop behaviour is a bit different from our tested expectation using simulation. The difference comes from modelling error and non-linearity of the process. The important issue is how to move PID parameters in the next step. The next figure includes four typical process behaviours. The horizontal axis shows the Proportional band and vertical axis shows Integrative time. As the center of the graph is an ideal response, how to adjust the proportional band and integral time toward the ideal direction is required. The figure shows a general rule how to tune PID parameters, though these are based on pre-knowledge obtained after iterating the simulation; a stricter modelling is also required.
Each vendor provides their own original PID loop tuning method, and academies are also studying a new algorithm even now. The difference mainly comes from the applied PID algorithm and applied criterion. Implementation environment such as DCS, PC, and network also provide us with a variety of tuning tools in the market. We can easily collect the process response data, estimate the model, tuning and simulation PID control, just from graphically operation. The important issue is to compare the obtained result with your process and control understanding to verify whether the result is reasonable. For further details, please refer to vendors’ web pages.
I encourage you to consider PID tuning at your plant. Try this exercise and you will easily understand the benefits and results in process behaviour, improving productivity and the lifetime if the plant equipment.
Do you have a question about this article? Please CONTACT US.